
Für uns beschränkt sich Innovation nicht nur auf Kundenprojekte: Sie findet auch intern statt, insbesondere durch die CIFRE-Dissertationen, die von einigen unserer Mitarbeiter durchgeführt werden. Florian Philippe ist einer von ihnen. Seine Karriere bei T&S begann 2020 mit einem Praktikum im Anschluss an das Bachelorstudium (Bac+3) zur Erprobung des Bosch Park Assist-Systems, das auf dem Daimler-Testgelände durchgeführt wurde (unter der Betreuung von Maxime Lordier). Im Jahr 2022 absolviert er ein Abschlusspraktikum (Master) zur Analyse von LiDAR-Daten für die Umgebungskartierung und Notbremsung (unter der Betreuung von Matthias Spisser). Seit Oktober 2022 arbeitet er an einer spannenden CIFRE-Dissertation an der Schnittstelle von Robotik, künstlicher Intelligenz und Landwirtschaft, in Zusammenarbeit mit T&S und ebenfalls unter der Betreuung von Matthias Spisser. Seine Promotion wird im Dezember 2025 abgeschlossen sein.
Ein Forschungsthema, das aus einem Treffen entstand … und aus einem Bedarf in der Praxis
Alles begann am Ende seines Abschlusspraktikums bei Innolab, wo Florian an Projekten im Bereich der autonomen Navigation mitarbeitete. Schnell nahm eine Idee Gestalt an: Was wäre, wenn die Robotik die Herausforderungen der Landwirtschaft bewältigen könnte?
„Warum beschäftigen wir uns mit der sicheren Navigation unbeaufsichtigter autonomer Geländefahrzeuge in bewaldeten Umgebungen? [...] Der Agrarsektor leidet unter Arbeitskräftemangel, und die Aufgaben sind monoton und beschwerlich. Wir wollen diese Probleme durch Robotisierung lösen.“ – Florian Philippe
Dies führte zu seiner Abschlussarbeit, die er gemeinsam mit Matthias Spisser (T&S) und Jean-Philippe Lauffenburger (IRIMAS, EA 7499), in der Navigationslösungen untersucht wurden, die an halbstrukturierte Umgebungen wie Obstgärten und Weinberge angepasst sind. Diese Herausforderung unterschied sich stark von herkömmlichen Problemen im Straßenverkehr.

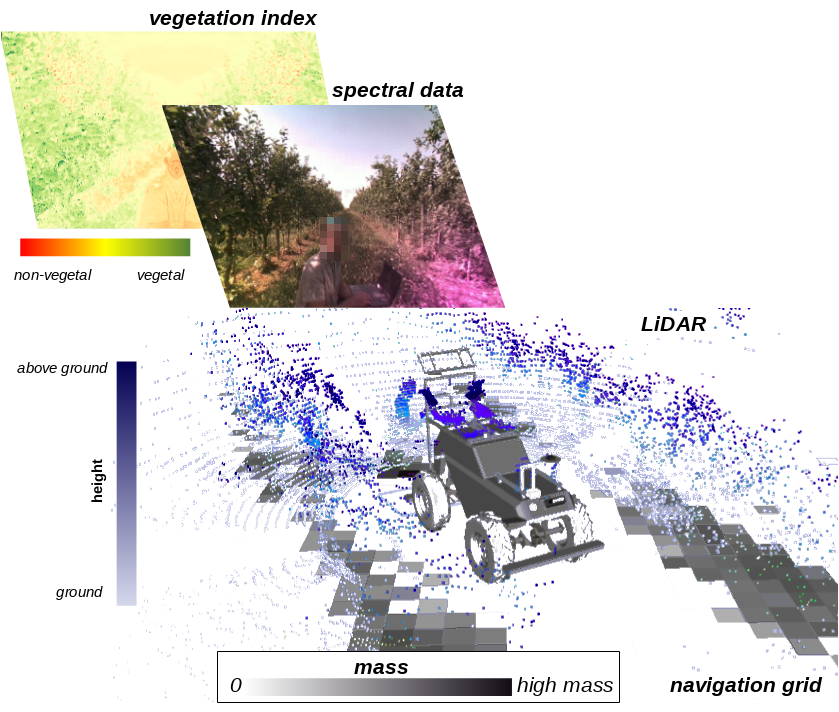
Angewandte Forschung unter Einbeziehung von Kameras, Lidar und grasbewachsenem Gelände
Florian setzt auf unseren KIPP-Roboter, der mit verschiedenen Sensoren ausgestattet ist: Lidar, RGB-D-Kameras, Multispektralkameras, Wärmebildkameras usw. Das Ziel besteht darin, dem Roboter ein besseres Verständnis seiner Umgebung zu ermöglichen, damit er über seine nächsten Schritte entscheiden kann.
„Derzeit berücksichtigen Analysewerkzeuge wie LACS lediglich geometrische Informationen. [...] Wir suchen daher nach anderen Methoden, um die Beschaffenheit der in dieser Umgebung vorkommenden Elemente zu berücksichtigen.“ – Florian Philippe
Seine Vorgehensweise ist klar: Er kombiniert oberirdische Daten (Pflanzen und andere Objekte) mit Bodendaten (Geländebeschaffenheit), um die zuverlässigste und wirtschaftlichste Route für den Roboter zu ermitteln. Dieser Ansatz vereint Modellierung, Geländebewertung und manchmal … das Unerwartete.
„Beim Experimentieren kann alles Mögliche passieren. Das ist es, was uns dazu antreibt, stets wachsam zu sein.“ – Florian Philippe
Konkrete fachliche Beiträge
Zu den wichtigsten Beiträgen dieser Arbeit gehören:
• Der innovative Einsatz von Multispektralkameras zur Erfassung der Vegetation aus nächster Nähe, direkt am Boden.
• Die Bewertung von Segmentierungsmethoden, die nicht auf überwachter KI basieren und in unzureichend dokumentierten Kontexten robuster sind.
• Die Entwicklung eines multimodalen Annotationswerkzeugs zur Verknüpfung von Informationen aus verschiedenen Sensoren.
Eine klare Vision, Herausforderungen angenommen
Eines der größten Hindernisse? Der Mangel an öffentlichen Datenbanken, die auf die Landwirtschaft zugeschnitten sind.
„Während für den Straßenbereich reichlich Daten zur Verfügung stehen, mangelt es im landwirtschaftlichen Bereich eindeutig an öffentlichen Datensätzen. Oft müssen wir diese selbst erstellen.“ – Florian Philippe
Gleichzeitig mussten Florian und unsere Teams die komplexe Logistik der Feldversuche bewältigen, die teilweise weit entfernt stattfanden, und gleichzeitig für ausreichende Rechenleistung für Entscheidungen in Echtzeit sorgen.
Beobachten, um besser zu schützen: Robotik für eine nachhaltigere Landwirtschaft
Über die autonome Navigation hinaus liegt einer der wichtigsten Beiträge der Agrarrobotik in ihrer Fähigkeit, regelmäßige Pflanzenkontrollen durchzuführen. Dank integrierter Sensoren (Multispektralkameras, Wärmebildkameras usw.) können Roboter Veränderungen im Pflanzenzustand überwachen, frühe Anzeichen von Stress oder Krankheiten erkennen und so gezieltere und rationellere Maßnahmen ermöglichen.
„Es geht nicht nur darum, in einem Bereich Fortschritte zu erzielen, sondern auch darum, zu verstehen, was dort vor sich geht. Indem wir Anomalien frühzeitig erkennen, können wir lokal mit weniger intensiven Behandlungen eingreifen oder bestimmte Behandlungen sogar ganz vermeiden.“ – Florian Philippe
Diese Inspektionsfunktion entspricht voll und ganz den aktuellen Herausforderungen, denen sich die Landwirtschaft gegenübersieht. Während die kürzlich erfolgte Verabschiedung des „Duplomb“-Gesetzes und insbesondere die bedingte Wiederzulassung des Pestizids Acetamiprid, eines umstrittenen Neonicotinoids, die Debatte über den Einsatz von Betriebsmitteln neu entfacht hat, bietet die Robotik eine ergänzende Alternative: die Reduzierung chemischer Behandlungen durch die Nutzung objektiver und kontinuierlicher Daten aus dem Feld.
Durch die Einbindung in die landwirtschaftliche Praxis könnten diese Technologien somit wirtschaftliche Leistungsfähigkeit, betriebliche Effizienz und Umweltschutz in Einklang bringen und konkrete Instrumente für den agroökologischen Wandel bereitstellen.
Und morgen?
Florians Abschlussarbeit ist fast fertig, eröffnet aber bereits jetzt viele neue Möglichkeiten, insbesondere in den Bereichen Standortbestimmung ohne GPS und dem sinnvollen Einsatz künstlicher Intelligenz.
„Eine Abschlussarbeit öffnet oft mehr Türen, als sie verschließt.“ – Florian Philippe
Florian plant, seine Arbeit indirekt fortzusetzen, diesmal durch die Betreuung einer neuen AID-Diplomarbeit (unterstützt vom Verteidigungsministerium), die kürzlich in Zusammenarbeit mit dem DRIVE-Labor in Nevers genehmigt wurde. Sein ehemaliger Praktikant, Titouan Leost, wird diese Abschlussarbeit übernehmen, deren Schwerpunkt auf der Umsetzung von Lösungen zur Befahrbarkeitsanalyse durch die Integration von KI-Modulen in unstrukturierte Umgebungen liegt, mit einer konkreten Anwendung im Verteidigungskontext. Dies ist ein logischer nächster Schritt, der das ursprüngliche Ziel erweitert: Robotik nicht nur für die Landwirtschaft, sondern auch für Sektoren wie das Bauwesen und die Verteidigung nützlich und relevant zu machen.
Ein persönliches und gemeinschaftliches Abenteuer
Der Erfolg dieser Arbeit beruht auch auf einem inspirierenden Umfeld: den Innolab-Teams, der Unterstützung durch das IRIMAS-Labor , dem Austausch mit dem INRAE und der Zusammenarbeit mit den Partnerlandwirten.
„Ein Doktorand ist nie auf sich allein gestellt. Das Labor hilft mir dabei, die Forschung wissenschaftlich zu verankern, während das Unternehmen den Markt und dessen Bedürfnisse kennt.“ – Florian Philippe
Zusammenfassend
Diese Abschlussarbeit verkörpert perfekt den Geist unseres Forschungs- und Entwicklungszentrums: die Verbindung von wissenschaftlicher Genauigkeit, praktischer Erfahrung und konkretem Nutzen. Sie zeigt zudem, wie ein Unternehmen durch die Förderung von Projekten mit hohem gesellschaftlichem Potenzial zu einem fruchtbaren Boden für die Forschung werden kann.










