
Pour nous, l'innovation ne se limite pas aux projets clients : elle se vit également en interne, notamment à travers les thèses CIFRE menées par certains de nos collaborateurs. Florian Philippe est l'un d'entre eux. Son parcours chez T&S a débuté en 2020 par un stage de fin de licence (Bac+3) consacré aux essais du système Bosch Park Assist, réalisé sur le site d'essais de Daimler (sous la supervision de Maxime Lordier). En 2022, il effectue un stage de fin d'études (master) consacré à l'analyse des données LiDAR pour la cartographie de l'environnement et le freinage d'urgence (sous la supervision de Matthias Spisser). Depuis octobre 2022, il travaille sur une thèse CIFRE passionnante à la croisée de la robotique, de l'intelligence artificielle et de l'agriculture, en partenariat avec T&S et également sous la supervision de Matthias Spisser. Son doctorat s'achèvera en décembre 2025.
Un sujet de recherche né d'une rencontre… et d'un besoin sur le terrain
Tout a commencé à la fin de son stage de fin d'études chez Innolab, où Florian a participé à des projets liés à la navigation autonome. Une idée a rapidement pris forme : et si la robotique pouvait répondre aux défis du monde agricole ?
« Pourquoi travailler sur la navigation en toute sécurité de véhicules tout-terrain autonomes sans pilote dans des environnements boisés ? [...] Le secteur agricole souffre d'un manque de main-d'œuvre, et les tâches sont répétitives et pénibles. Nous cherchons à résoudre ces problèmes grâce à la robotisation. » — Florian Philippe
Cela a donné lieu à sa thèse, rédigée en collaboration avec Matthias Spisser (T&S) et Jean-Philippe Lauffenburger (IRIMAS, EA 7499), qui a exploré des solutions de navigation adaptées aux environnements semi-structurés tels que les vergers et les vignobles. Ce défi était très différent des problèmes traditionnels liés à la circulation routière.

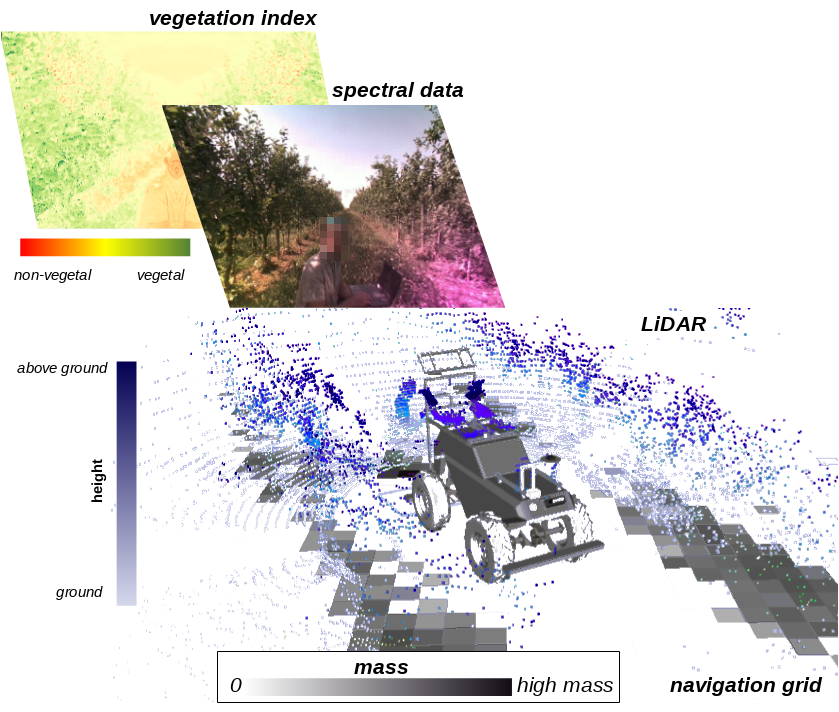
Recherche appliquée combinant caméras, lidar et terrain herbeux
Florian s'appuie sur notre robot KIPP, équipé de capteurs : lidar, caméras RVB-D, caméras multispectrales, caméras thermiques, etc. L'objectif est de permettre au robot de mieux appréhender son environnement afin de déterminer ses actions futures.
« Aujourd’hui, les outils d’analyse tels que LACS ne prennent en compte que les informations géométriques. [...] Nous cherchons donc à utiliser d’autres méthodes pour tenir compte de la nature des éléments rencontrés dans cet environnement. » — Florian Philippe
Sa méthodologie est claire : combiner les données en surface (objets végétaux et non végétaux) et les données au sol (qualité du terrain) afin de déterminer l'itinéraire le plus fiable et le plus économique possible pour le robot. Cette approche allie modélisation, terrain et parfois… l'imprévu.
« Tout peut arriver quand on expérimente. C'est ce qui nous pousse à rester toujours vigilants. » — Florian Philippe
Contributions techniques concrètes
Parmi les principales contributions de cette thèse, on peut citer :
• L'utilisation innovante de caméras multispectrales pour observer la végétation de près, au niveau du sol.
• L'évaluation de méthodes de segmentation ne reposant pas sur l'IA supervisée, qui s'avèrent plus robustes dans des contextes peu documentés.
• Le développement d'un outil d'annotation multimodal permettant de croiser les informations provenant de différents capteurs.
Une vision claire, des défis relevés
L'un des principaux obstacles rencontrés ? Le manque de bases de données publiques adaptées au secteur agricole.
« Alors que le domaine routier est bien couvert, le secteur agricole manque clairement de données publiques. Nous devons souvent les créer nous-mêmes. » — Florian Philippe
Parallèlement, Florian et nos équipes ont dû gérer la logistique complexe des essais sur le terrain, parfois très éloignés, tout en garantissant une puissance de calcul suffisante pour permettre une prise de décision en temps réel.
Observer pour mieux protéger : la robotique au service d'une agriculture plus durable
Au-delà de la navigation autonome, l'une des principales contributions de la robotique agricole réside dans sa capacité à effectuer des inspections régulières des cultures. Grâce à des capteurs embarqués (caméras multispectrales, caméras thermiques, etc.), les robots peuvent surveiller l'évolution de l'état sanitaire des plantes, détecter les premiers signes de stress ou de maladie, et ainsi permettre des interventions plus ciblées et plus rationnelles.
« Il ne s'agit pas seulement d'avancer dans un domaine, mais aussi de comprendre ce qui s'y passe. En détectant plus tôt les anomalies, nous pouvons intervenir localement avec des traitements moins agressifs, voire éviter complètement certains traitements. » — Florian Philippe
Cette fonction d'inspection s'inscrit pleinement dans le contexte des défis actuels auxquels est confronté le monde agricole. Alors que l'adoption récente de la loi Duplomb, et en particulier la réautorisation sous conditions de l'acétamipride, un néonicotinoïde controversé, a relancé le débat sur l'utilisation des intrants, la robotique offre une alternative complémentaire : réduire les traitements chimiques en s'appuyant sur des données objectives et continues recueillies sur le terrain.
En s'intégrant aux pratiques agricoles, ces technologies pourraient ainsi concilier performance économique, efficacité opérationnelle et respect de l'environnement, offrant ainsi des outils concrets pour la transition agroécologique.
Et demain ?
La thèse de Florian est presque terminée, mais elle ouvre déjà de nombreuses perspectives, notamment dans les domaines de la localisation sans GPS et de l'utilisation judicieuse de l'intelligence artificielle.
« Une thèse ouvre souvent plus de portes qu’elle n’en ferme. » — Florian Philippe
Florian prévoit de poursuivre indirectement ses travaux, cette fois en dirigeant une nouvelle thèse AID (soutenue par le ministère des Armées), récemment approuvée en partenariat avec le laboratoire DRIVE à Nevers. Son ancien stagiaire, Titouan Leost, prendra le relais avec cette thèse, qui portera sur la mise en œuvre de solutions d’analyse de praticabilité en intégrant des modules d’IA dans des environnements non structurés, avec une application concrète dans un contexte de défense. Il s’agit d’une suite logique, qui prolonge l’ambition initiale : rendre la robotique utile et pertinente, non seulement pour le monde agricole, mais aussi pour des secteurs tels que la construction et la défense.
Une aventure à la fois humaine et collective
La réussite de cette thèse repose également sur un environnement stimulant : les équipes d'Innolab, le soutien du laboratoire IRIMAS , les échanges avec l'INRAE et la collaboration avec les agriculteurs partenaires.
« Un doctorant n’est jamais seul. Le laboratoire m’aide à définir mon projet de recherche sur le plan scientifique, tandis que l’entreprise connaît le marché et ses besoins. » — Florian Philippe
En résumé
Cette thèse incarne parfaitement l'esprit de notre centre de R&D : elle allie rigueur scientifique, expérience pratique et utilité concrète. Elle montre également comment une entreprise peut constituer un terreau fertile pour la recherche en soutenant des projets à fort potentiel sociétal.










